The Privacy-Utility Tradeoff for Remotely Teleoperated Robots
D. J. Butler, J. Huang, F. Roesner, and M. Cakmak, “The Privacy-Utility Tradeoff for Remotely Teleoperated Robots,” in ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2015, pp. 27–34, doi: 10.1145/2696454.2696484.
Abstract
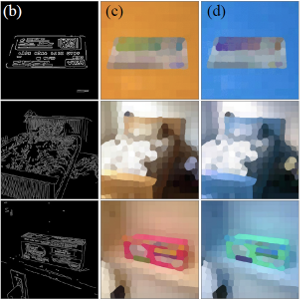
Though teleoperated robots have become common for more extreme tasks such as bomb diffusion, search-and-rescue, and space exploration, they are not commonly used in human-populated environments for more ordinary tasks such as house cleaning or cooking. This presents near-term opportunities for teleoperated robots in the home. However, a teleoperator’s remote presence in a consumer’s home presents serious security and privacy risks, and the concerns of end-users about these risks may hinder the adoption of such in-home robots. In this paper, we define and explore the privacy-utility tradeoff for remotely teleoperated robots: as we reduce the quantity or fidelity of visual information received by the teleoperator to preserve the end-user’s privacy, we must balance this against the teleoperator’s need for sufficient information to successfully carry out tasks. We explore this tradeoff with two surveys that provide a framework for understanding the privacy attitudes of end-users, and with a user study that empirically examines the effect of different filters of visual information on the ability of a teleoperator to carry out a task. Our findings include that respondents do desire privacy protective measures from teleoperators, that respondents prefer certain visual filters from a privacy perspective, and that, for the studied task, we can identify a filter that balances privacy with utility. We make recommendations for in-home teleoperation based on these findings.
BibTeX Entry
@inproceedings{butler2015hri,
title = {The Privacy-Utility Tradeoff for Remotely Teleoperated Robots},
author = {Butler, Daniel J. and Huang, Justin and Roesner, Franziska and Cakmak, Maya},
year = {2015},
booktitle = {ACM/IEEE International Conference on Human-Robot Interaction (HRI)},
pages = {27--34},
doi = {10.1145/2696454.2696484},
isbn = {9781450328838},
type = {conference}
}