RSS 2016 Paper
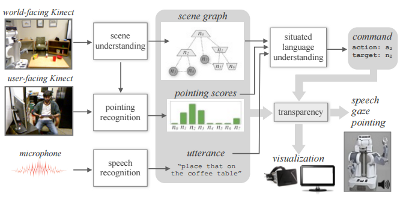
April 12th, 2016Leah Perlmutter’s paper (with Eric Kernfeld and Maya Cakmak) on Situated Language Understanding with Human-like and Visualization-Based Transparency, was accepted to RSS 2016. The paper presents a system for improved communication between humans and robots, as well as an end-to-end task recognition system.