FLEXI paper at DIS 2022
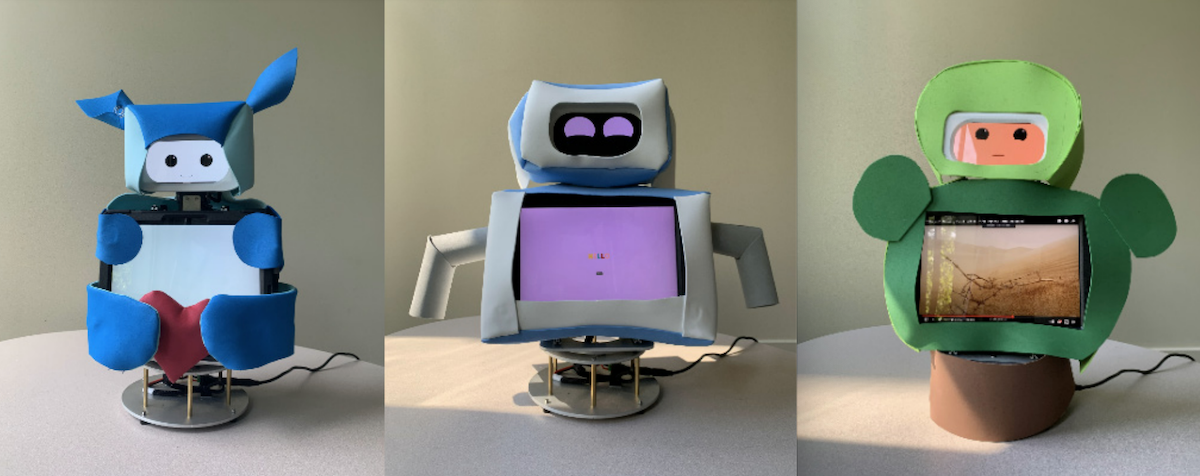
June 1st, 2022Our pictorial paper describing FLEXI, a customizable social robot harware toolkit, was recently published at the Designing Interactive Systems (DIS) Conference, 2022.
Flexi: A robust and flexible social robot embodiment kit. Patricia Alves-Oliveira, Matthew Bavier, Samrudha Malandkar, Ryan Eldridge, Julie Sayigh, Elin A Björling, Maya Cakmak. Designing Interactive Systems Conference (DIS), 2022.