RoboFlow: A Flow-based Visual Programming Language for Mobile Manipulation Tasks
Z. T. Sonya Alexandrova and M. Cakmak, “RoboFlow: A Flow-based Visual Programming Language for Mobile Manipulation Tasks,” in IEEE International Conference on Robotics and Automation (ICRA), 2015, pp. 5537–5544, doi: 10.1109/ICRA.2015.7139973.
Abstract
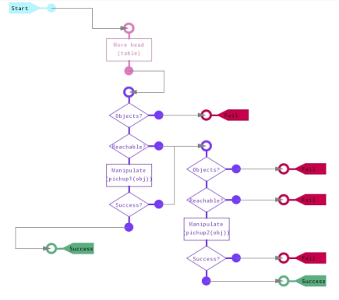
General-purpose robots can perform a range of useful tasks in human environments; however, programming them to robustly function in all possible environments that they might encounter is unfeasible. Instead, our research aims to develop robots that can be programmed by its end-users in their context of use, so that the robot needs to robustly function in only one particular environment. This requires intuitive ways in which end-users can program their robot. To that end, this paper contributes a flow-based visual programming language, called RoboFlow, that allows programming of generalizable mobile manipulation tasks. RoboFlow is designed to (i) ensure a robust low-level implementation of program procedures on a mobile manipulator, and (ii) restrict the high-level programming as much as possible to avoid user errors while enabling expressive programs that involve branching, looping, and nesting. We present an implementation of RoboFlow on a PR2 mobile manipulator and demonstrate the generalizability and error handling properties of RoboFlow programs on everyday mobile manipulation tasks in human environments.
BibTeX Entry
@inproceedings{alexandrova2015icra,
title = {RoboFlow: A Flow-based Visual Programming Language for Mobile Manipulation Tasks},
author = {Sonya Alexandrova, Zachary Tatlock and Cakmak, Maya},
year = {2015},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
pages = {5537--5544},
doi = {10.1109/ICRA.2015.7139973},
isbn = {978-1-4799-6923-4},
type = {conference},
video = {https://www.youtube.com/watch?v=CEKFUMBNEmU&t=8s}
}